

導入
カーボンニュートラルへ世界が移行していく中、自動車の電動化も近年急速に進んでいます。特にxEV車両は環境規制の強化、コア技術の革新、コストの低下に伴って普及が加速しています。
世界のほぼすべての地域が厳しい環境規制に取り組んでおり、各地域の温室効果ガス(GHG)基準もそれに準ずる形となっています。ほかに影響力のある要因としては特に米国で現在の新政府の下でより厳しいGHG排出基準が予想されており、BEVへの移行フェーズで早期に利用可能なソリューションとして、特にHEVの活性化が期待されます。マイルドハイブリッド(48Vシステム)はGHG基準を満たすのに貢献していますが、OEMの観点では、各国の二酸化炭素排出規制を違反した場合の罰金を回避するのに十分ではありません。
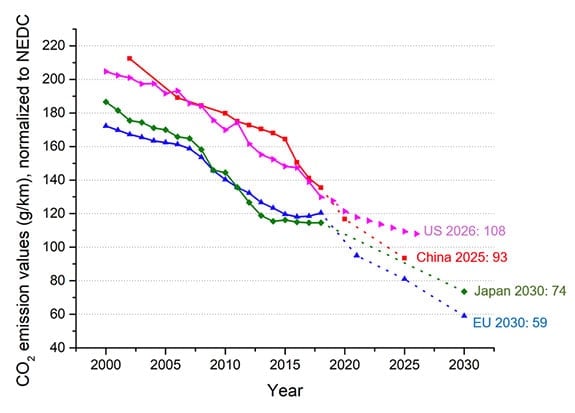
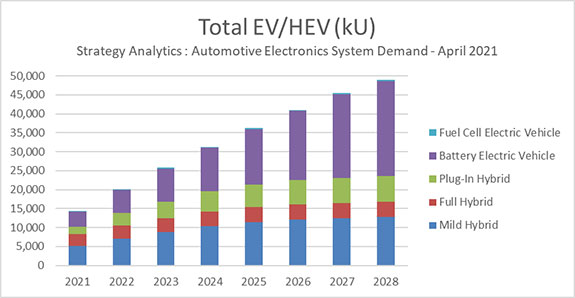
GHG排出規制の規制傾向が加速しているため、世界のxEV市場は長期的な拡大の時期に向かっています。それと同時に、バッテリのコストも下がる可能性があります。各国の規制(燃費基準/BEV販売規制)が厳しくなるとxEVの需要は2025年頃まで生じ、2025年以降はバッテリを含めたコア技術が徐々に安くなるため、自主成長のフェーズに移行します。
HEV システム要件とコンセプト
特にPHEVとFHEVは協調制御を行うため、それぞれのシステムコンセプトに応じて構成が複雑になっていきます。また、ICEとe-Drive機能の追加による基本的なアプリケーション部品のスペースにも考慮が必要です。これは電気機械部品だけではなく、デジタルチップセットや、アナログ、電源部品などの電子機器も当てはまります。
これらのシステムの複雑さは、以下に述べるようなトップレベルの機能に依存します。
- 車両の減速時に、運動エネルギーはe-motorによって電気エネルギーに変換され、バッテリに保存されます。
- 加速時には、バッテリからの電気エネルギーがICEをサポートするために使用されるため、燃料消費が節約されます。
- FHEV用の高出力e-motorを使用することで、より大きな発電容量を持つことになり、より大きな運動エネルギーを減速時に回収(もしくは回復)することができます。結果として、燃料効率を数十パーセント向上させることができます。
HEV 制御: 複雑度のコンセプト
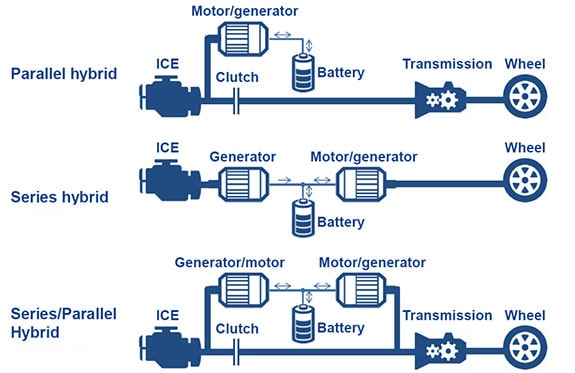
いくつかの種類のハイブリッド機構があり、図3にトップレベルの概要を示しています。最もシンプルなものがパラレルハイブリッドシステムです。1つのモータと1つのICEが並列に配置されます。モータ/ジェネレータはバッテリからの電気エネルギーを使用して加速をアシストし、減速時にはジェネレータとしてモータを使用することでバッテリに充電します。このシステムの利点は、低コストで制御の複雑性も小さいことにあります。
シリーズハイブリッドシステムの場合は、ICEによって生成された運動エネルギーが、ジェネレータによって電気エネルギーに変換され、電気エネルギーはもう一つのモータによって再度運動エネルギーを生成するために使用されます。これは一見コストとエネルギーを浪費しているようにみえますが、ICEを最も燃料効率の高い速度/トルク範囲で操作できるという利点があります。ICEは低速(例えば<1500rpm)、高速(例えば>4000rpm)、低トルク領域では低い燃料効率を示します。
シリーズ/パラレルハイブリッド は最も複雑なシステムです。ICEが燃料効率の高い速度/トルク領域で動作する際、ICEの出力はクラッチやトランスミッションを介して直接ホイールに送られます。もしトルクアシストが必要な場合は、e-motorが加速をアシストし、ICEはパラレルハイブリッドシステムのように燃料を節約できます。車のスピードが非常に遅い場合は、クラッチが切断され、シリーズハイブリッドとして動作して低燃料効率領域でのICE動作を回避します。
通常、シリーズおよびシリーズ/パラレルハイブリッドシステム構成の場合、2つのモータ、ジェネレータデバイスの組み合わせを厳密かつ相互に依存して制御する必要があります。
HEV制御: キーチャレンジとソリューション
前述のトラクションモータシステムの概念から、特に、シリーズ/パラレルハイブリッドシステムの場合は各要素間の通信負荷が高く、ターゲットとなるASILレベルを維持するための診断も増加するため、それぞれの制御や同期が複雑であることが明らかになります。
これらの作業を最適化するための明確なソリューションは、2つのインバータ制御システムを一つのECUに統合し、1つの専門性の高いマイクロコントローラ(MCU)で操作することです。このようなコンセプトを用いることで、両方のインバータ制御ループ間の同期を1つのコントローラ内に実装できるため、通信帯域幅が広くなり、待ち時間が短くなります。さらに、ASIL準拠のターゲットデバイスを選択することで、診断と機能安全のコンセプトがより簡単になります。統合されたソリューションのもう一つの利点は、構成部品スペース要件の削減で部品表(BOM)が大きく最適化されることで、どちらもシステムコンセプト全体にとって非常に歓迎される効果をもたらします。
ソリューション: MCUと統合 xEV サポートの特長
HEVアプリケーション専用MCUの鍵となる資産は、モータ制御アルゴリズムのベクトル演算の計算プロセスを専用の処理IPにオフロードすることです。この方法を使用することで、MCUは上述のように他のソフトウェアタスクを引き継ぐ間、より少ない数のCPUコアを装備することができます。
エンハンスドモータコントロールユニット(EMU3)
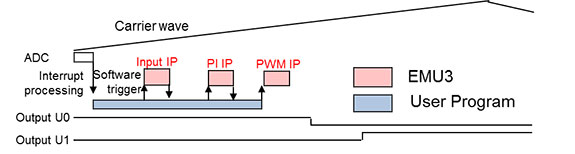
「エンハンスドモータコントロールユニット」(EMU3)は、ADコンバータで取得された電流値とモータ角度に基づき、ベクトル制御アルゴリズムを使って3相PWMコンペア値を計算する個別のモータ制御アクセラレータモジュールのセットです。さらに、モータの角度値が内蔵「レゾルバデジタルコンバータ」(RDC3A)を介して取得され、位置センサインタフェース機能として動作します。EMU3の計算結果は3相モータタイマであるTSG3によってPWMと矩形波を出力するために使用されます。
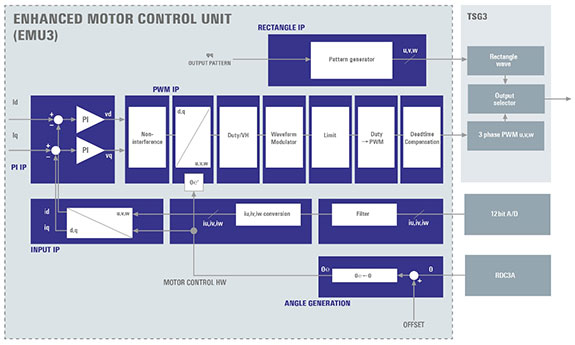
EMU3 IPは機能ブロック間のユーザ固有のソフトウェアと組み合わせてモータ制御機能を実行できます。そのため、ハードウェアアクセラレーションと個々のユーザソフトウェアを組み合わせた柔軟な制御コンセプトを実現できます。
デュアル e-motor/ジェネレータ制御
デュアルe-motor/ジェネレータ制御機能を実現するための重要なソリューションは、前述のモータ制御IP(EMU3)および組み込み位置センサインタフェースがどのようにMCUシステムに組み込まれているかに基づいています。
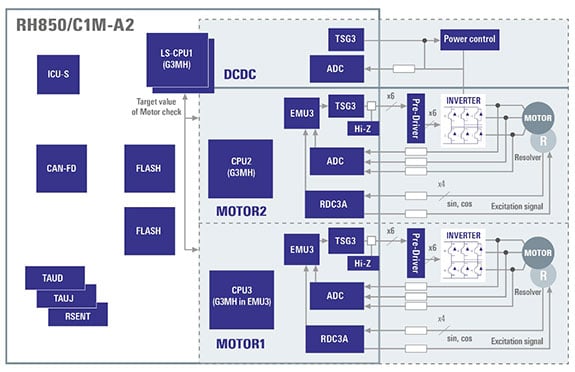
次の図は、2つのe-motorを制御するための実際のアプローチを示しています。(略語の定義は付録を参照してください)
- CPU2とCPU3は各々1つのモータを制御しています。EMU3を使用することにより、PWMパターン生成のためのパーク/クラーク変換などパフォーマンスを重視するモータ制御アルゴリズム処理が、CPUからEMU3へと移行します。これにより、診断処理などその他の重要なソフトウェア処理をCPUで実行できるようになります。
- CPU1は他の機能を実行できます: 例 DC/DC変換制御をオプションで内蔵されたアドオン機能として実現し、HEVシステム全体のレイアウトを最適化します。
- RDC3AはMCUに内蔵の(多摩川精機 AU6805相当)のレゾルバデジタルコンバータインタフェース、もしくはより一般的にはアナログレゾルバまたは誘導位置センサ信号に接続できるモータ位置センサインタフェースです。
Renesasが提供するソリューション
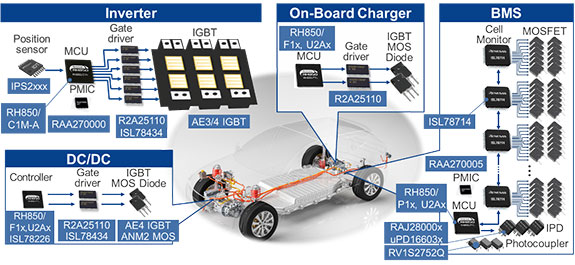
Renesasの40nmマイクロコントローラRH850/C1M-Axの中には、何世代にもわたってHEV制御の使用されたコンセプトが搭載されています。このデバイスと、まもなくリリースされる後継の28nmデバイスはトラクションモータのインバータ制御機能に重点を置いています。適切なPMICや、ゲートドライバ、IGBTなどのインバータターンキーソリューションは顧客のR&Dリソースを大幅に削減できます(図9参照)。
まとめ
e-Drive/ICEシステムの組み合わせに基づいて制御をするハイブリッド車はシステムが複雑になるため、コスト効率が高く、サイズが最適化された駆動システムが特に必要となります。ベクトル演算用の専用HWアクセラレータ機能を備えたトラクションインバータ専用の高性能マイクロコントローラ(MCU)は、全体的に最適化された電子、電子機械システム設計の実現に役立ちます。