
进化中的E/E架构开发所面临的课题
软件正在为汽车创造新的价值,因此客户的应用软件正在有大规模代、复杂化的趋势。由此,提高软件开发的效率方法,已经成为高级车载软件开发所必不可少的需求。
伴随着E/E架构的进化,需要同时搭载复数个硬件。复数个硬件中的复数个软件之间的通信测试是必须的。
只有在复数个硬件之间的建立通讯之后,搭载在上面的复数个软件才能进行通信测试。然而这个测试一般都是在开发后期才能进行。一但发生问题,返工的成本也会随之上升。
如果利用模拟环境,在开发前期就可以进行测试。但是,各个硬件模拟环境之间没有建立通讯,所以没法进行复数的硬件之间的系统级别的测试。
由于复杂的测试脚本不能执行,所以很难保证产品的质量。
a a
多设备的协同模拟环境概要
多设备的协同模拟环境概要
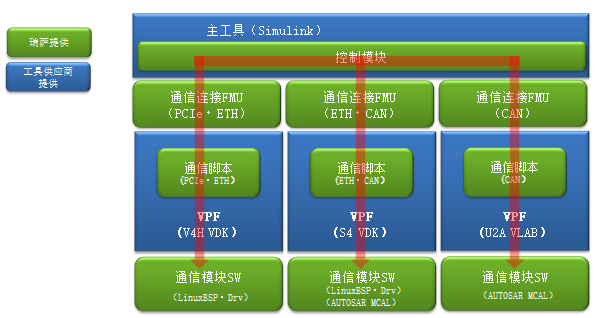
正如图1多设备的协同模拟环境结构图所示。
瑞萨提案使用“多设备的协同模拟环境”来实现在没有实体硬件的情况下进行提前开发。
- 通过主工具(*1)把各个VPF连接起来的“FMU(*2)”以及“控制模块”
- 连接FMU与VPF的“通信脚本”
- 硬件模拟器“VPF(*3)”
- 在相互连接的VPF之上运行的“通信模块SW”
因为在VPF上开发的软件可以直接在硬件上运行,即使硬件开发延迟也不会影响软件的开发与测试。这样的话,可以提前开发相互通信连接的软件,并可以在开发前期就能进行测试。(用户需要拥有主工具与VPF)
(*1)主工具:调整与同步各VPF的动作。
(*2)Function Mockup Unit(FMU):根据Function Mockup Interface(FMI)的要求来连接不同工具的库。由主工具将其导入,在主工具内相互连接。
(*3) Virtual Platform(VPF):模拟SOC与MCU,在硬件上的软件不用修改就可以直接在VPF上运行。
CAN模型间的连接方法
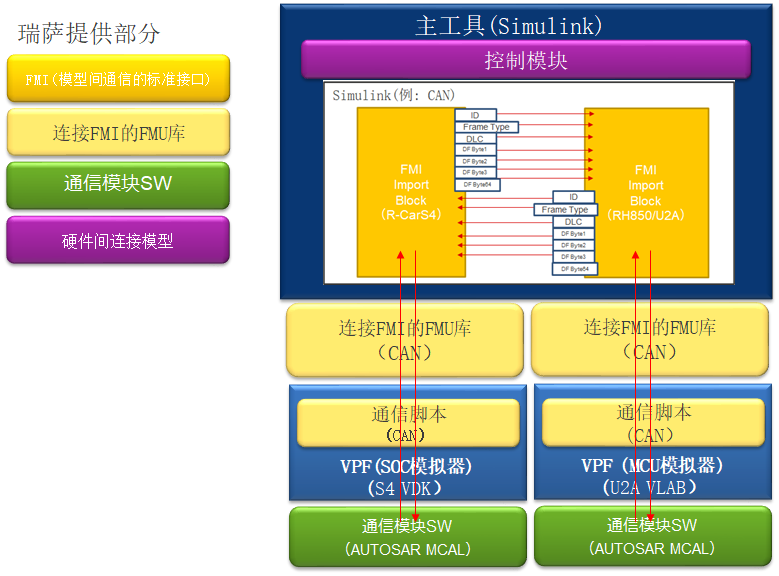
正如图2通过FMI连接的模型之间利用CAN的通信方法所示。
FMI定义了收发信息的类型与时机,但是没有定义具体的通信式样。用户可以通过FMI来定义具体用什么模式、怎么方式的连接式样。
多设备的协同模拟环境开发状况
由此,在多设备的协同模拟环境里,图2的FMI import Block之间利用CAN的通信式样,就可以进行通信了。
本次介绍了R-CarS4与RH850/U2A之间CAN通信的多设备的协同模拟环境。
我们录制好了实际的动作视频,请参考这个链接(Introduction of Virtual Platform Co-simulation | Renesas)。
今后,R-CarV4H将与马达等平台模型连接。这样以来,人们可以从事更广阔范围的硬件间的连接的软件开发/软件研究。
