
ROS 机器人本体控制器参考设计
此参考设计支持使用机器人操作系统(ROS)控制多个伺服系统。 我们的 RA6M5 MCU 采用高性能 Arm® Cortex-M33®,集成了以太网和 USB 等通信接口,可在 ROS 节点之间丝滑地传递发布/订阅(Pub/Sub)消息。 我们利用 ISL81401 降压升压控制器和其他功率器件,为每个伺服装置及整个系统提供所需的精确电压。
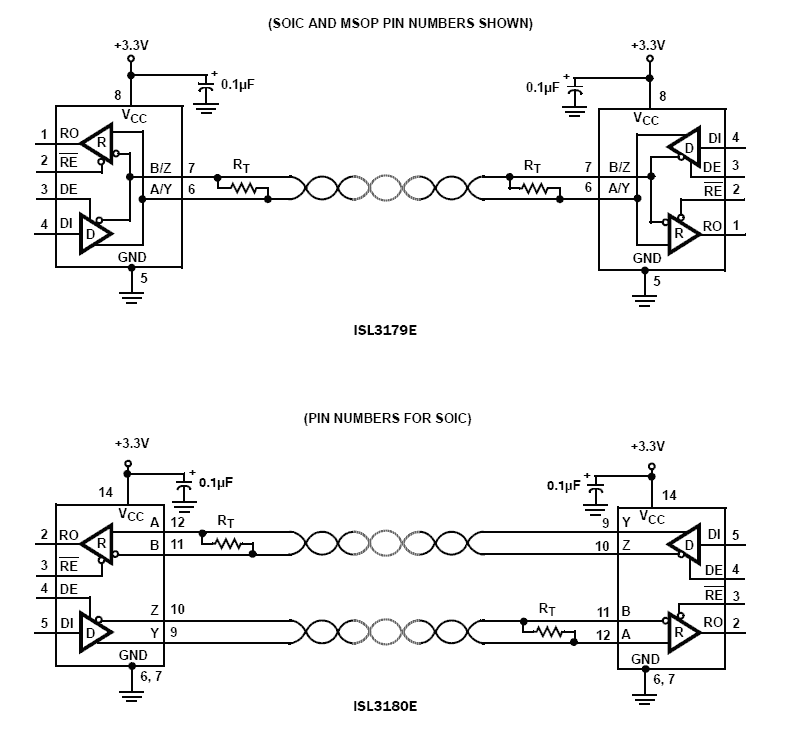
The ISL3179E and ISL3180E are high ESD protected, 3. 3V powered, single transceivers that meet both the RS-485 and RS-422 standards for balanced communication. Each device has low bus currents (+220μA/-150μA), so they present a “1/5 unit load” to the RS-485 bus. This allows up to 160 transceivers on the network without violating the RS-485 specification’s 32 unit load maximum, and without using repeaters. Receiver (Rx) inputs feature a “full fail-safe” design, which ensures a logic high Rx output if Rx inputs are floating, shorted, or terminated but undriven. The ISL3180E is configured for full duplex applications. The ISL3179E half duplex version multiplexes the Rx inputs and Tx outputs to allow a transceiver with an output disable function in 8 Ld packages. Hot plug circuitry ensures that the Tx and Rx outputs remain in a high impedance state while the power supply stabilizes.
此参考设计支持使用机器人操作系统(ROS)控制多个伺服系统。 我们的 RA6M5 MCU 采用高性能 Arm® Cortex-M33®,集成了以太网和 USB 等通信接口,可在 ROS 节点之间丝滑地传递发布/订阅(Pub/Sub)消息。 我们利用 ISL81401 降压升压控制器和其他功率器件,为每个伺服装置及整个系统提供所需的精确电压。
点击产品选项表中的产品,查找 SamacSys 中的原理图符号、PCB 足迹和 3D CAD 模型。点击产品选项表中的产品,查找 SamacSys 中的原理图符号、PCB 足迹和 3D CAD 模型。
当前筛选条件