有刷直流电机
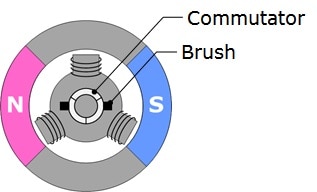
由于这种类型的电机由直流电源驱动,因而简称为直流电机。 为了与永磁同步电机(无刷直流电机)区分开来,这里我们称其为有刷直流电机。 由于它相对经济实惠且易于驱动,因此有刷直流电机的应用非常广泛。
有刷直流电机机械地切换电流方向,并且使用换向器和电刷实现旋转,从而产生扭矩。 有刷直流电机的缺点包括:因电刷磨损而需保养以及产生的电气和机械的噪声。 PWM 占空比可以通过微控制器等进行调整,以改变施加的电压,从而可以控制旋转速度和位置。
应用
- 玩具
- 电动工具
- 汽车电子零部件
永磁同步电机(无刷直流电机)
去掉换向器和电刷这两个有刷直流电机的缺点,你就能得到一个永磁同步电机(无刷直流电机)。
由于没有电刷,无刷直流电机具有优异的设备寿命和低噪声特性。 此外,它效率很高,所以应用十分广泛,包括节能家用电器以及长时间运行的工业应用。
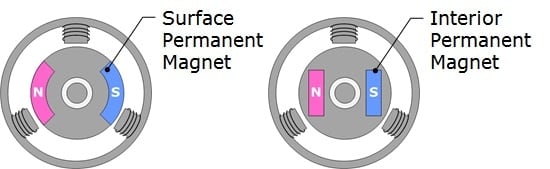
主要有两个类型的结构,不同之处在于磁铁在转子上的装备方式。
- 表面永磁体(SPM):将永磁体固定在转子的外部,并且磁导率在所有位置都是恒定的。
- 内部永磁体(IPM):在转子内部嵌入了永磁体,由于磁导率随位置而变化,因此可以使用电阻转矩。
由于没有机械切换电流方向的结构,因此需要使用逆变电路以电子方式执行此操作。 通过使用微控制器等驱动逆变电路,将三相交流电压施加到定子上,从而产生旋转磁场。
驱动波形可分为以下两种主要类型。
- 梯形波驱动:通过施加梯形(矩形)波电压来驱动。
- 正弦波驱动:通过施加正弦波电压进行驱动,以抑制梯形波驱动遇到的振动、噪声和转矩脉动。 在许多情况下,矢量控制(磁场定向控制)用于以线性独立的方式控制扭矩和相位。 由于扭矩与驱动电流成正比,因此通过添加位置和速度传感器,可以实现高速、高精度的位置和速度控制。
为了高效驱动,必须检测转子(磁铁)的位置。 霍尔传感器、编码器和旋转变压器用于检测位置。 由于要考虑传感器的温度限制和成本,有时会在不使用传感器的情况下根据三相电流或感应电压估计转子(磁铁)的位置(无传感器位置估计)。
一般来说,工业系统主要使用传感器方法,家用电器系统使用无传感器位置估计方法。
应用
- 空调
- 洗衣机
- 冰箱
- 电动工具
- 伺服
- 机器人
- 压缩机
- 硬盘驱动器(HDD)
- 汽车电子零部件
三相感应电动机
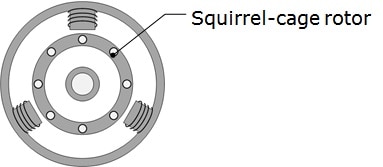
三相感应电动机是在三相交流电源上驱动的感应电动机。 三相交流电通过定子产生旋转磁场,通过电磁感应在转子中产生感应电流。 这种旋转的磁场和感应电流会产生电磁力,从而引起转子旋转。 由于磁场需要相对于转子移动才能产生感应电流,因此转子的旋转速度总是慢于旋转磁场的同步速度。 旋转磁场的频率与相当于旋转速度的频率之间的差值称为滑移频率。 产生的扭矩与滑差频率成正比。
三相感应电动机的结构简单而坚固。 因为它对于大功率电机来说使用方便,效率也比较高,所以经常用于工业领域。 但是,由于上述滑移频率,它不适合用于位置控制。
在许多情况下,工厂等地方使用的三相交流电是直接输入的,以恒定速度驱动电机。 对于重视效率的可调速度节能应用,电机可以由变频器驱动来控制扭矩和旋转速度。
应用
- 工业设备
单相感应电动机
单相感应电动机,顾名思义,是一种运行在单相交流电源上的感应电动机。 因为单相交流电无法实现自启动,所以电机需要一种启动方式。
单相感应电动机根据它们的启动方式可分为以下三种主要类型。
- 电容器:电容器分相产生两相交流电,以获得启动转矩。
- 分相:使用低电感的起动线圈来获得起动转矩。
- 阴影极:阴影极产生感应电流,用于获得启动转矩。
在许多情况下,家庭等地方中使用的单相交流电是直接输入的,以恒定速度驱动电机。 可以使用三端双向可控硅来控制交流电压相位,以控制旋转速度。
应用
- 冰箱
- 风扇
- 真空吸尘器
- 压缩机
步进电机
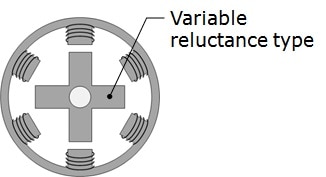
步进电机通过切换施加在定子绕组上的电压模式,以类似阶梯的方式旋转转子的位置。 由于电压模式切换的次数和电压模式的旋转角度成精确比例,因此可以在没有任何反馈的情况下控制位置。 步进电机的缺点包括扭矩小、无法处理突然的负载变化以及易受振动影响而降低效率。
步进电机可分为以下三种主要类型。
- 可变电阻(VR):也称为开关电阻电机(SR 电机)。 因为没有磁铁,所以成本低,但缺点是效率低。
- 永磁体(PM):由于使用了永磁体,因此扭矩和效率相对较高。 此外,即使电流不流动,也可以保持位置。
- 混合动力(HB):将 VR 和 PM 类型相结合,用于具有良好分辨率、相对扭矩和效率的电机。
主要有四种驾驶方式。
- 单相激励:按顺序将电流送过任何单相绕组来驱动。
- 两相激励:按顺序将电流通过任何两相绕组来驱动。
- 单到两相励磁:将单相励磁和两相励磁相结合,以两倍的步距角驱动。
- 微步进:通过正弦改变发送到每个相位的电流量,以高分辨率步距角驱动。
应用
- 办公自动化设备
- 相机
- 工业设备