
Motors come in a variety of types and applications, from simple DC motors and inverters to complex AC servos, and are said to consume 40% of the world's energy. With the enactment of energy-saving systems in various countries, the need to reduce the power consumption of motor control systems, which consume large amounts of power, will likely become more and more important. To reduce power consumption in these motor control applications, it is most effective to improve the precision and efficiency of the motor itself in order to reduce energy loss. High-speed and high-precision detection of many parameters such as motor position, speed, current, and voltage is important as an elemental technology to realize it.
In particular, for motors such as large drives and AC servos requiring high power operation with low power consumption, high-accuracy feedback of motor speed, torque, and current/voltage, which is the basis for position control, is the most important parameter. A/D converters are generally used to detect current and voltage, but there are various types of ADCs depending on the application. The types used in embedded systems are listed below. In addition, there are mounting methods such as those with a built-in microcomputer and those with an insulation function.
| Type | Features | Use |
|---|---|---|
| Flash type | 6-8bit, sampling frequency 100M-1GHz | High speed signal measurement |
| Pipe-line type | 8-12bit, sampling frequency 1M-1GHz | Image sensor processing |
| Successive Approximation Register type | 8-14bit, 1us conversion time | Motor control, mainstream with embedded MCU |
| Sigma-delta type | 16-24bit resolution | Audio, camera lens, measurement instrument, sensors |
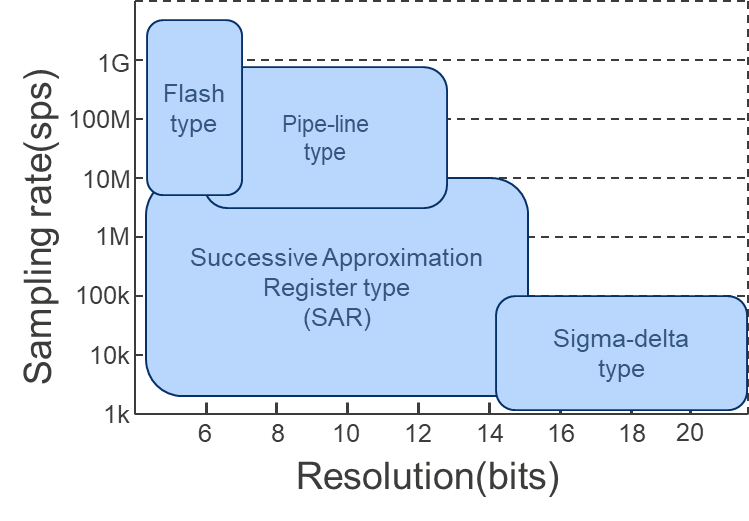
The successive approximation type, which is mainly used in motor control, has a resolution of 8 to 14 bits, a sampling rate of about 1 Msps, and a conversion time of about 1 µs, which is the reciprocal of that. There is also the ΔΣ type as a higher resolution conversion method, which achieves 16 to 24 bits, but for motor control, most of the specifications have a long conversion time and cannot follow fluctuations in motor current.
The RA6T2 motor control MCU released in December 2021 has a built-in successive approximation type 12-bit ADC which is capable of high-speed conversion of 6.25 Msps. New device options have been released with a new type of 16-bit ADC function as an additional specification. This hybrid type A/D converter combines the successive approximation type and ΔΣ type to deliver the following features.
Features of RA6T2's new A/D converter:
- Existing successive approximation type 12-bit ADC functions can be used as previously
- New A/D converter called a Noise-Shaping successive approximation A/D converter (NS-SAR ADC)
- Circuit method that achieves both the high speed of successive approximation ADCs and the high accuracy of delta-sigma ADCs
As a result, the RA6T2 can achieve both a high sampling rate of 6.25 Msps and 16-bit resolution. In actual motor control applications, the high speed makes it possible to secure the operation time of the current control block when the PWM frequency goes up, and at the same time, it greatly contributes to improving the control accuracy at light loads and low currents, which requires current detection accuracy.
In addition to the release of a hybrid ADC, we have also released a new differential input function. As engineers know well, differential inputs reduce common-mode noise and interference, and offer greater dynamic range compared to single-ended inputs.
Please refer to the table below for detailed specifications of the RA6T2 ADC. You can see that the high speed of the successive approximation type and the high resolution of the 16-bit ADC are compatible.
| Type | Hybrid Type | |
|---|---|---|
| SAR | NEW Noise-Shaping SAR (NS-SAR) | |
| Resolution | 12-bit | 16-bit |
| Input signal | Single-ended | Single-ended, Differential |
| ENOB (Typ) | 11-bit | Sinc filter: 13-bit (Single-ended), 14-bit (Differential) Min phase filter: 11-bit (Single-ended), 12-bit (Differential) |
| Sampling rate (Max) | 6.25Msps | Oversampling mode 6.25M/22 sps Hybrid mode 5.55Msps |
| Conversion time (Min) | 0.16us | Oversampling mode 0.16us x 22 TAPs Hybrid mode 0.18us |
| Use | Motor phase current detection Sensor | Oversampling mode: Sensor Hybrid mode, Continuous scan mode: Sensor Hybrid mode, Background scan mode: Motor current detection |
You can immediately build an evaluation environment using an actual hybrid ADC. The inverter board attached to the CPU board of MCK-RA6T2, the motor control evaluation kit for RA6T2, supports only single-end, but the connection I/F of the CPU board with the external inverter board is patterned so that differential input is also possible. This allows easy connection to the user's differential compatible system. Request a motor control kit in order to experience the performance of this excellent hybrid ADC with the RA6T2 CPU board for yourself.
Finally, with the release of the new hybrid ADC, the product name has not changed but the suffix of the orderable part number has been updated as noted in the table below.
| SAR 12-bit ADC version | Hybrid 16-bit ADC version | |
|---|---|---|
| Product Part Name | R7FA6T2xxxxxx#AA0 R7FA6T2xxxxxx#BA0 (Full carton) | R7FA6T2xxxxxx#AA1 R7FA6T2xxxxxx#BA1 (Full carton) |
xxxxxx: 6 digit internal memory, function, package code.
Basic evaluation of the hybrid ADC is possible with the old suffixes (#AA0/#BA0) but please note that operation and electrical characteristics are only guaranteed with the new suffixes (#AA1/#BA1).
Please visit renesas.com/RA6T2 for more information, including a white paper and app notes. You can find details on the motor control evaluation kit at renesas.com/MCK-RA6T2.