
近年来,各种类型和型号的真空吸尘器都实现了各种新功能。 一个关键功能是地板类型检测,它有助于在许多情况下保持一致操作,并且可以提供许多好处,包括:
- 降低功耗
- 用户操作简单
- 电机降噪
功耗是所有电池供电型号的关键考虑因素,但在机器人清洁器中尤其重要。
检测地板类型的方法
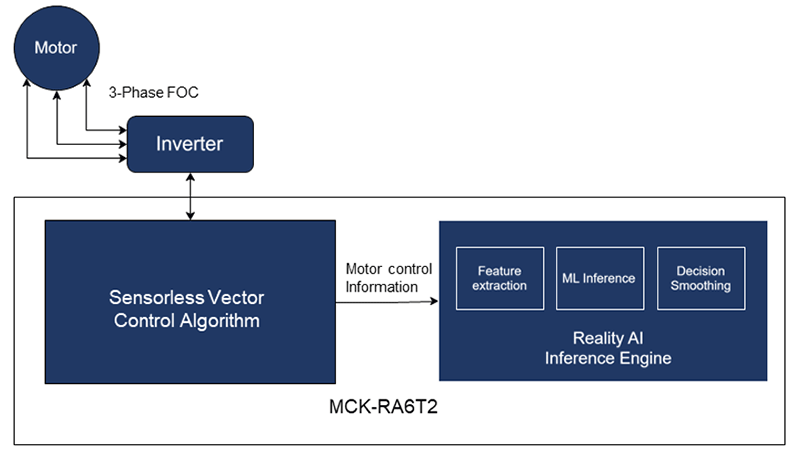
由于在头上运行电刷的成本、维护和噪音的改善,无刷直流电机已经占领了更多的市场。 实施逆变器或 MCU 来驱动 BLDC 电机的成本越来越便宜。 在这里,我们介绍了一个典型的用例,该案例采用具有无传感器地板类型检测功能的 BLDC 电机。
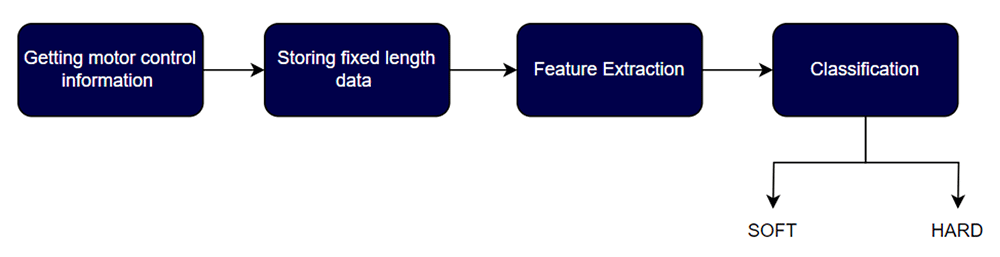
- 获取电机控制信息: 与电机控制逻辑共享来自分流寄存器的反馈信息
- 存储固定长度数据: 获取数据的决策窗口
- 特征提取: 系统从电机控制信息中提取特定特征
- 分类: 提取后,使用分类器对地板类型进行分类
通过使用这种实现方式,由于不需要额外的传感器,因此可以显著降低 BOM 成本。
瑞萨电子提供的应用示例
瑞萨电子地板类型检测解决方案专为速度和响应能力而设计,同时保持高精度。 我们以最低的 BOM 成本利用 RA 和 RX MCU 平台的硬件。 在这个解决方案中,我们使用的是 RA6T2 MCU。
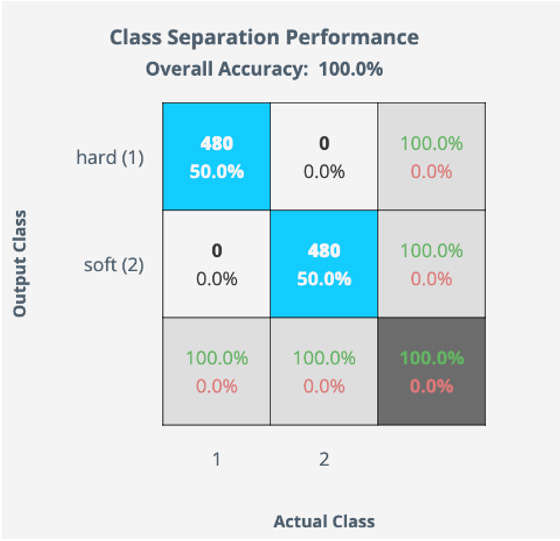
在概念验证 (PoC) 单元中,我们的模型将地板分为两种类型:软地板和硬地板。 通过添加训练数据,您可以轻松增加要分类的楼层类型的数量。
此用例中的模型大小:
参数: 2678 bytes
堆栈使用: 2560 bytes
预分配: 12 bytes
代码: 2008 bytes
使用 RA6T2 MCU 的推理时间约为 1 毫秒至 2 毫秒
我们是如何创建应用示例的?
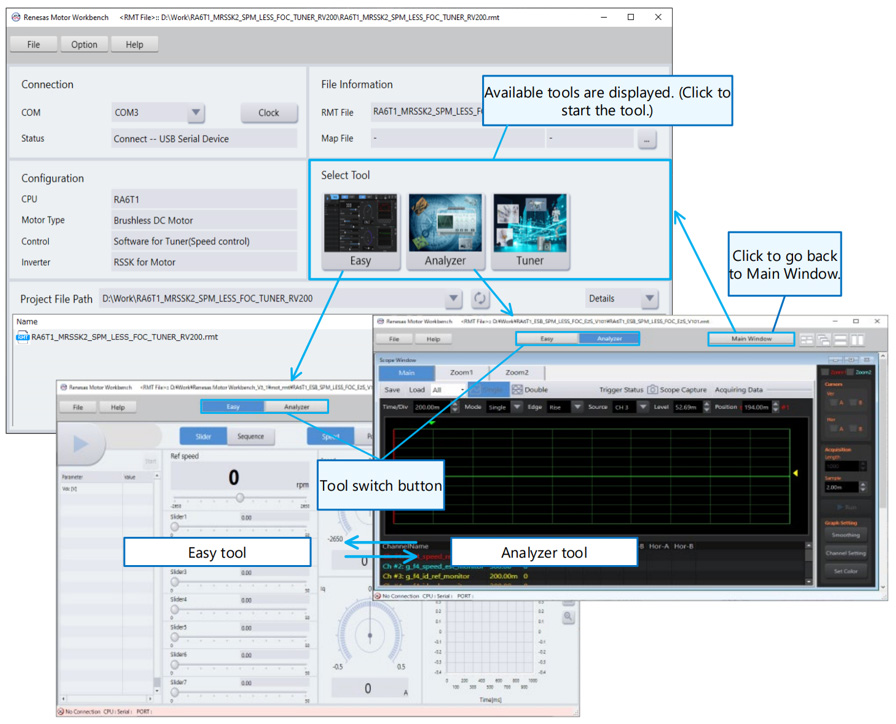
瑞萨电子正在推出各种类型的电机控制解决方案,并提供软件示例。 利用瑞萨电子 e² studio IDE 和 Motor Workbench 开发支持工具,用户可以优化电机参数、收集数据、与真空吸尘器所需的其他功能集成,并最终集成使用 Reality AI Tools® 模块生成的任何 AI 模型。
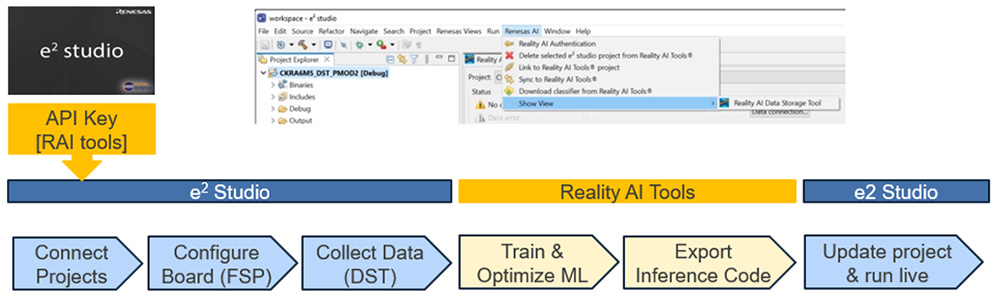
我们通过使用电机控制示例代码中的现有变量来收集真实的电机控制数据,并记录了地板类型的数据以进行分类。 这些数据被馈送到 Reality AI 的特征提取和训练引擎,以开发和输出模型。 我们实现了 100% 的训练 K-Fold 准确率,这促使我们选择该模型进行实时测试和基准测试。 同时,Reality AI 的BOM 优化功能会从电机信息的数十个现有变量中建议最佳的信息组合使用,并最大限度地减少资源需求。
在实际硬件上实施模型之前,可以使用另一个未用于训练的记录数据集对模型进行测试,以便在 Reality AI 上进行确认,以减少开发工作量。 一旦达到预期的精度,该模型就会被重新集成到 e² studio 项目中。 然后,该模型在现场环境中进行了广泛的测试。
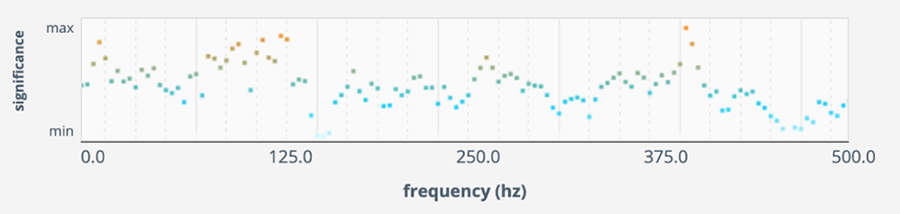
要将机器学习模型产品化,有时需要了解机器学习模型的工作原理以及它如何确定结果以避免黑盒情况。 Reality AI 还为解决方案提供了此类情况,并可以使用决策显著性图显示哪些特征重要,哪些特征不太重要。
在进一步或将来增强的情况下,Renesas 还提供了一种重新训练模型的方法。 只需更新机器学习模型参数,即可轻松改进 Reality AI Tools 创建的模型。 这些参数可以放置在 flash的单独区域,例如数据区域,并且可以通过无线 (OTA) 非常容易地更新。
结论
地板类型检测示例展示了 Renesas Reality AI Tools 在解决实际挑战以改善用户体验和为真空吸尘器增强额外功能的能力。 我们的 AI 模型占用空间小,并且可以通过利用广泛的数据收集来进行灵活的扩展。
有关更多信息(包括视频和文档)或请求演示,请访问 renesas.com/reality-ai-tools。
