
概述
描述
这些基于旋转变压器的电机控制解决方案,是通过将旋转变压器到数字转换器 (RDC) IC 和 RX 系列微控制器 (MCU) 相结合而实现的工业和消费应用的电机控制系统。利用微控制器的驱动程序软件,可以方便地控制基于旋转变压器的步进电机或无刷直流电机。提供了解决方案套件、示例代码、开发支持工具和带旋转变压器的电机应用笔记,使用旋转变压器的电机控制可立即启动。
● 特点
- 即使在高温、灰尘或振动的恶劣环境中,也可实现高精度的电机控制。
- 采用性价比最高的新型旋转变压器控制,从而实现低成本的高精度控制。
- 通过结合RX MCU的驱动程序 API ,自动校正旋转变压器信号增益、相位和角度误差,实现高精度控制。
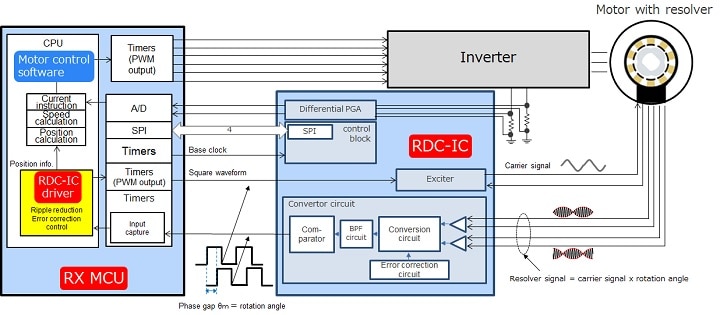
● 系统配置
在基于旋转变压器的电机控制解决方案中,RDC IC 和 RX MCU 将来自旋转变压器的信号处理为角度信息,RX MCU 则控制电机。RX MCU 上提供了 RDC IC 专用驱动程序,使用 API 可以轻松地执行旋转变压器处理。
◆ 兼容的旋转变压器和电机
- 提供用于步进电机和无刷直流电机的驱动程序。通常,由于电磁噪声的影响,步进电机的旋转变压器传感器使用起来很困难,但这些解决方案通过噪声对策解决了这一问题。
- 这些解决方案可兼容电压检测型旋转变压器和电流检测型旋转变压器。旋转变压器必须是单相励磁两相输出型旋转变压器。不仅可以使用一般电压检测型旋转变压器,还可使用低成本制造的电流检测型旋转变压器。
◆ 带旋转变压器的步进电机的电机控制解决方案
- 带旋转变压器的步进电机和旋转变压器电机控制解决方案由 MinebeaMitsumi Inc. 和瑞萨电子合作开发,让通常由开环控制的步进电机有可能实现伺服控制。
- 这些解决方案具有低噪声、低振动、低功耗、最大化电机扭矩等优点。
◆ 传统电机解决方案面临的挑战
- 需要选择更大的电机来确保扭矩失步裕度
- 使用开环控制的步进电机消耗大量电流且产生大量热量
- 扭矩脉动会引起振动和噪声
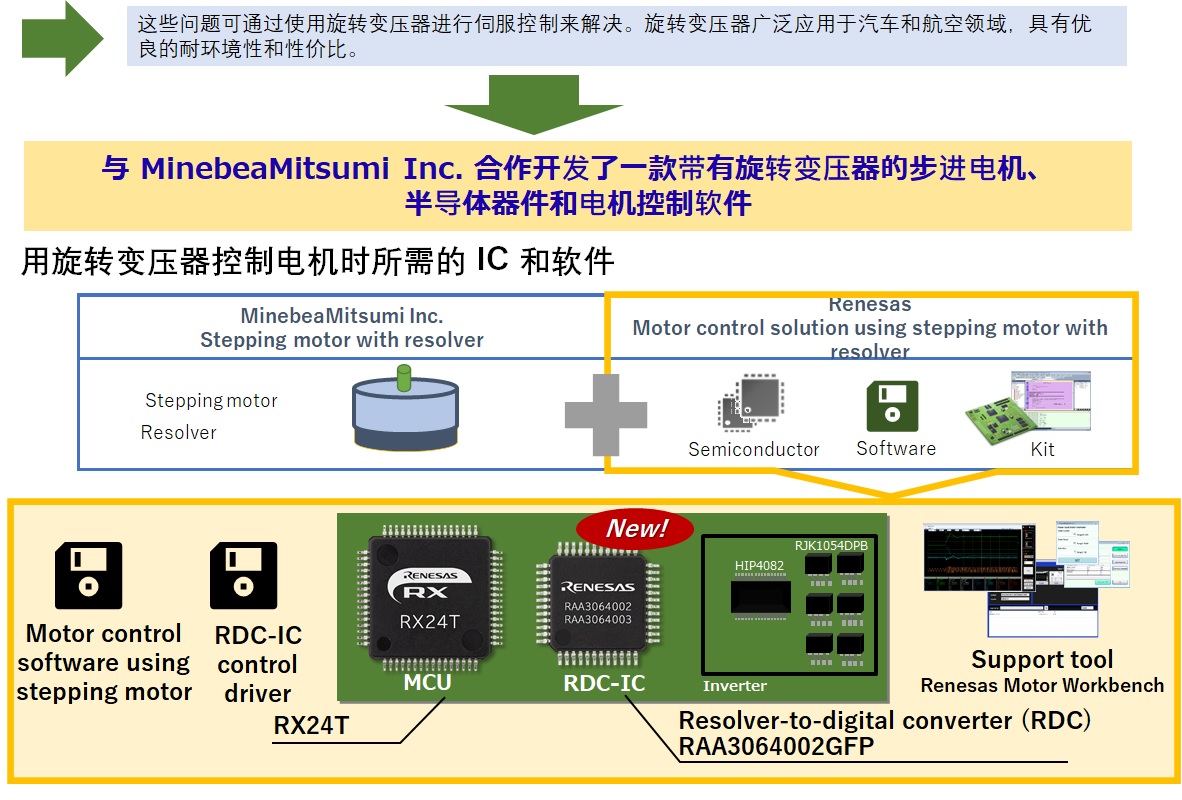
解决方案内容
- 带旋转变压器的步进电机:由 MinebeaMitsumi Inc. 制造的新电机
- RX24T:用于电机控制的 MCU
- 旋转变压器到数字转换器:将旋转变压器输出转换成数字信号的 IC
- 解决方案套件:提供了用旋转变压器控制步进电机所需的所有项目
● 解决方案的有效性
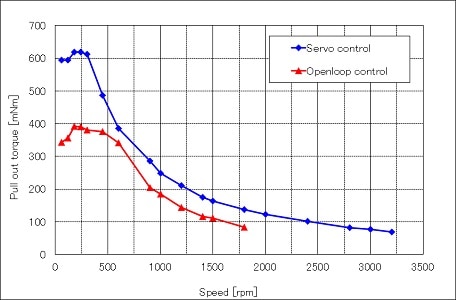
◆ 电机扭矩最大化
- 通过执行伺服控制,电机可实现扭矩最大化,并支持高速旋转。由于可简单地根据所需扭矩选择电机,而不考虑失步裕度,因此与开环控制方法相比,可缩小电机尺寸。
◆ 低功耗
通过使用旋转变压器执行伺服控制,可以显著降低待机电流,并且只消耗负载所需的电流。此外,还可通过降低电流消耗来抑制电机的发热。
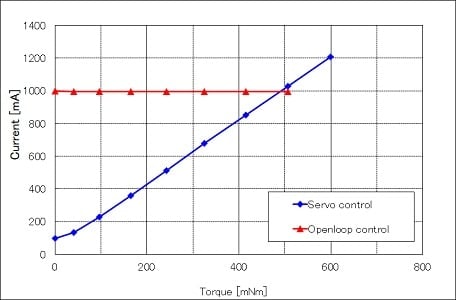
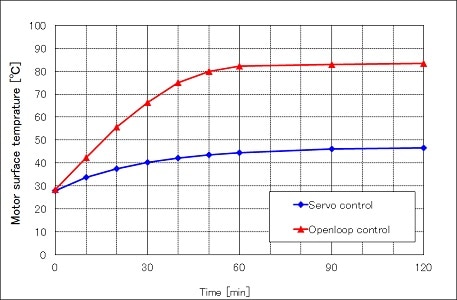
在开环控制过程中,由于电机在负载扭矩为 500mNm 或更大时失步,因此没有获得任何数据。
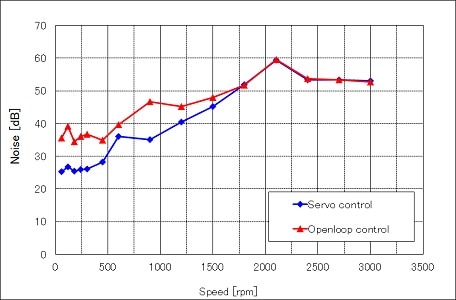
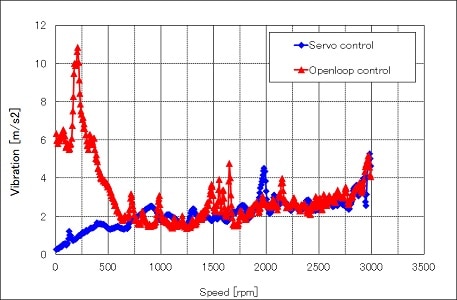
◆ 低噪音、低振动
与开环控制相比,使用旋转变压器执行伺服控制可以抑制高达中速范围的噪声和振动。
● 二轴手臂机器人参考指南
我们基于带有旋转变压器的步进电机控制方案, 开发了适用于两轴手臂机器人的参考指南
◆ 特征
- 通过RX72M实施 数字化(NC)控制,通过RX24T控制各轴电机
- 通过手臂轨迹控制(CP控制),可在150mm x 153mm的范围内以最大250 mm/s的速度实现任意路径连续动作
- 通过旋转变压器的高位置分辨率(200,000P/R),使得定位置精度达到±0.2mm
◆ 公开项目
- 二轴手臂机器人参考指南
- NC控制、电机控制样本程序
- 手臂机器人结构图
- 42mm方形电机控制板原理图/版图/零件清单
- 85mm方形电机控制板原理图/版图/零件清单
- 演示用PC GUI工具
◆ 概略图
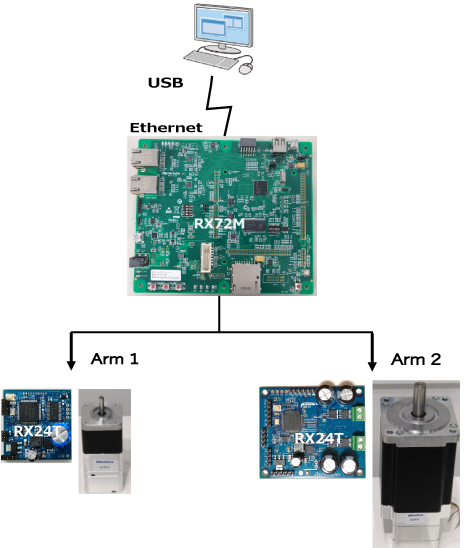
- GUI(PC)
- 示教
- 执行演示动作
- NC Control Board
- 轨迹控制
- 插补运算(直线插补、圆弧插补)
- 加减速计算(移动平均过滤器)
- 关节角度计算(顺序雅可比计算)
- 单轴移动(无插补、指定角度)
- 连续动作功能(直线移动与圆弧移动组合动作)
- 轨迹控制
- 通信
- RS485,半双工Modbus通信(1Mbps)
- 使用电机
- 两相步进电机
- 旋转变压器
- 位置分辨率20万P/R
- 电机控制
- 位置/速度/电流矢量控制
◆ 应用笔记
Reference Guide for a 2-Axis Robot Arm with 2-Phase Stepping Motors Incorporating Resolvers Rev. 1.00 (PDF | English, 日本語)
◆ 参考指南
RX24T, RX72M, RAA3064002GFP/RAA3064003GFP Reference Guide for a 2-Axis Robot Arm with 2-Phase Stepping Motors Incorporating Resolvers Rev.1.00 - Sample Code (ZIP | English, 日本語)
◆ 演示视频
◆ 用于无刷直流电机的电机控制解决方案
正在开发中。
产品对比
应用
相关评估板和套件

Evaluation System for Stepping Motor with Resolver
This solution kit allows you to easily evaluate and study the RX family and resolver to digital converter (RDC) ICs provided by Renesas. A stepping motor with resolver is included, and evaluation can be started immediately after purchasing the kit using software that can be downloaded from the... 阅读详情
软件
软件下载
| 类型 | 文档标题 | 日期 |
|---|---|---|
| 示例代码 | [Toolchains=CC-RX|V3.04.00] ZIP 101.88 MB 日本語 应用: 电机驱动 Compiler: CC-RX IDE: CS+, e2 studio | |
| 示例代码 | ZIP 81.81 MB 日本語 Compiler: CC-RX IDE: CS+, e2 studio | |
| 示例代码 | ZIP 22.06 MB 日本語 Compiler: CC-RL Function: Application Example IDE: e2 studio This sample code is sample software for tuning and GUI-based demo operation of a 2-axis robot arm system. The system consists of RX72M-based robot arm trajectory control software and RX24T-based motor control software. | |
3 项目 | ||


